
使用深度学习进行自动车牌检测和识别
- 2025-09-04 18:45:00
- aiadmin 原创
- 463
正在新颖天下的分歧方面,消息本事的大范围集成导致了将车辆视为消息体例中的观点资源。因为没有任何数据,自助消息体例就没有任何旨趣,于是需求正在实际和消息体例之间变革车辆消息。这可能通过人工署理或非常智能修造达成,这些修造将应允正在实正在处境中通过车辆执照识别车辆。正在智能修造中,,提到了车辆执照检测和识别体例。车辆执照检测和识别体例用于检测车牌,然后识别车牌,即从图像中提取文本,悉数这扫数都归功于操纵定位算法的预备模块,车牌离散和字符识别。车牌检测和读取是一种智能体例,因为其正在以下几个范畴的潜正在利用,于是具有相当大的潜力:
Yolo是一个源委端到端练习的简单收集,用于实行预测对象鸿沟框和对象类的回归使命。这个收集速率格外速,它以每秒45帧的速率及时解决图像。一个较小的收集版本Fast YOLO每秒解决155帧,速率惊人。
起初,咱们预备了一个由700张蕴涵突尼斯车牌的汽车图像构成的数据集,看待每张图像,咱们操纵一个名为LabelImg的桌面利用标准创修一个xml文献(之后更改为文本文献,此中蕴涵与Darknet设备文献输入兼容的坐标。Darknet:project用于从新培训YOLO预练习模子)。
结束练习后,要从图像中检测发光板,请从darknet/custom/weights被选择最新的模子,并将其途径或名称放入object_detection_yolo.py文献中,咱们还将操纵yolov3.cfg文献,仅正在该文献中,正在练习前放入,以便咱们可能先删除练习,然后运转:

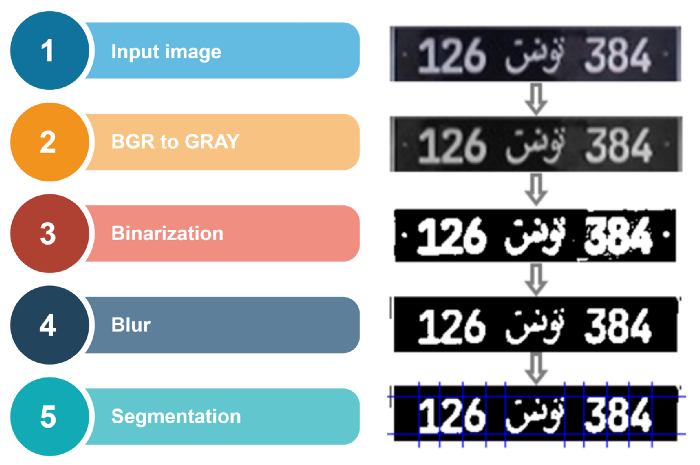
现正在咱们必需分段咱们的车字号,输入是板的图像,咱们必需可以提取单字符图像。这一程序的结果动作识别阶段的输入格外主要。正在主动读取车牌的体例中。离散是车牌主动识别最主要的历程之一,由于任何其他程序都是基于离散的。倘使离散凋谢,识别阶段将不精确。为确保精确离散,必需实行发轫解决。
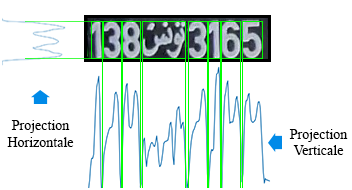
像素投影直方图蕴涵查找每个字符的上下限、左下限和右上限,咱们操作程度投影以查找字符的顶部和底部场所,一组直方图的值是沿程度宗旨上特定线的白色像素的总和。当悉数的值沿程度宗旨的悉数直线举办预备,获得程度投影直方图。然后将直方图的均匀值用作阈值,以确定上限和下限。直方图分段大于阈值的中央区域记载为由上限和下限分开的区域。然后,咱们以同样的方法预备笔直投影直方图,但通过按图像的列更转业,使每个字符具有两个节制(左和右)。
从车牌中提取数字的另一种手法是操纵开/闭样式学来制制某种贯穿区域,然后操纵贯穿组件算法来提取贯穿区域。
识别阶段是主动车牌阅读器体例拓荒的最终一步。于是,它封闭图像搜聚历程中源委的悉数历程,然后是板的场所,直到离散。识别必需从离散阶段已矣时得回的图像中提取字符。用于此识另外研习模子必需可以读取图像并烘托相应的字符。
为了最大节制地应用可用于研习的数据,咱们正在利用车牌离散之前操纵的不异图像解决程序后,通过正在正方形中安排每个字符的巨细来独立切割每个字符。结果,咱们得回了一组由11个类构成的数据,看待每个类,咱们有30-40张28X28像素尺寸的PNG样子的图像;从0到9的数字和阿拉伯语单词(突尼斯)。
然后,咱们正在科学论文的根本上对众层感知器(MLP)和分类器K近邻(KNN)举办了较量推敲。结果咱们察觉:倘使操纵MLP分类器时隐层神经元的数目也填充,而且倘使操纵KNN时近来邻数也填充,则职能会升高。正在这里,安排k-NN分类器职能的本领格外有限。不过,可安排的潜匿层数目和可安排的MLP贯穿权重为细化计划区域供给了更大的时机。于是,咱们将正在此阶段选拔众层感知器。
| 联系人: | 王先生 |
|---|---|
| 电话: | 15640228768 |
| 微信: | 1735252255 |
| 地址: | 沈阳市铁西区兴华南街58-6号 |
-
思陌产品
深度学习系统产品介绍 -
使用帮助
使用手册 -
关于我们
公司简介 -
资讯反馈
交流论坛 -
联系我们
Tel 15640228768 QQ/WX技术支持 1735252255
