
基于点云 RGBD的3D视觉检测技术
- 2026-04-19 18:06:00
- aiadmin 原创
- 213
3D视觉本领相较于2D视觉能获取更充裕更统统的境遇消息,一经成为呆板人导航、无人驾驶、巩固/虚拟实际、工业检测等规模的要害本领.现时基于2D的的筹划机视觉本领日趋成熟,正在许众规模获得了很不错的发展,但咱们可靠的天下是三维空间,使用2D的本领对可靠天下举行筑模存正在天分的缺陷——深度消息缺失,咱们不行从2D图片中获取物体的绝对标准和地点,而这一点正在点云中不会存正在题目.“从单幅图像到双目视觉的3D宗旨检测算法”先容了基于单目(monocular)视觉以及双目(binocular)视觉的3D宗旨检测算法,单目做3D检测齐备是数据驱动,通过呆板研习模子连合拍照几何的桎梏去拟合3D空间的数据散布;双目视觉会有分外的视差消息,可能重筑出景深消息,因此可能取得比单目视觉更强的空间桎梏合连,正在3D宗旨检测职司重的精度比拟单目会更好。
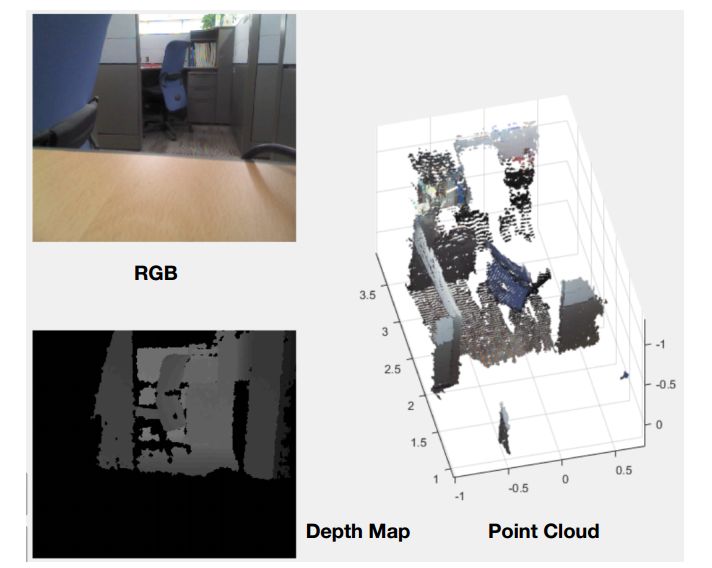
本日的作品重要先容基于点云数据的宗旨检测,点云可能直接由激光雷达扫描取得也可能通过深度传感器例如PrimeSense的PrimeSensor、微软的Kinect、华硕的XTionPRO等带深度感知的装备获取RGBD图像然后构制点云.
点云数据自然具有强几何消息,很适合3D宗旨检测职司,常睹的三维数据体例有点云(point cloud),体素(voxel grid),Mesh以及TSDF,对付每种体例的运用场景这里不做过众描摹. 目前基于3D点云的宗旨检测大致分为以下几类:
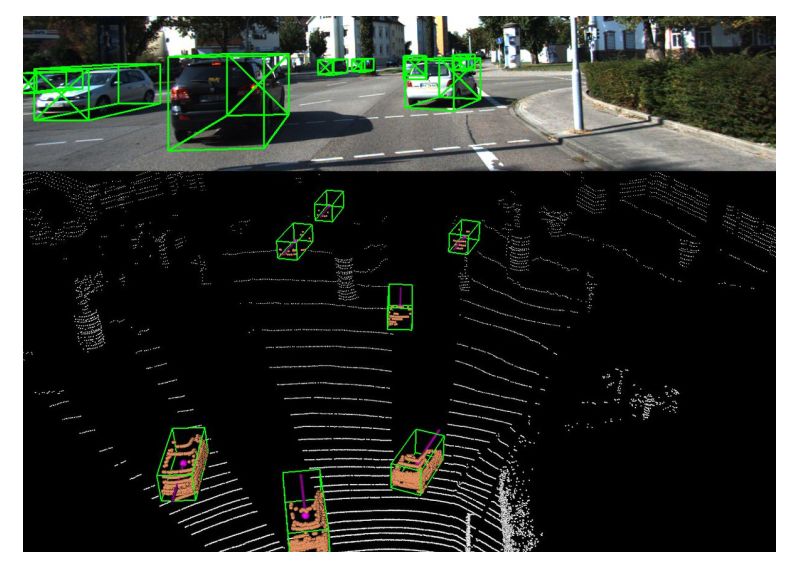
该作家提出了一个众视角(Multi-View)的3D物体检测框架,采用众模态的数据举动输入席卷点云的BVE图, 点云FV图以及对应的RGB图。
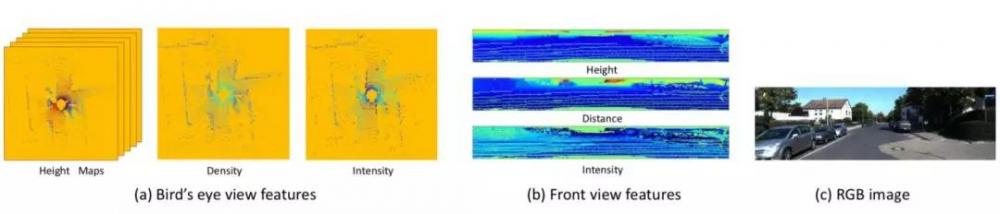
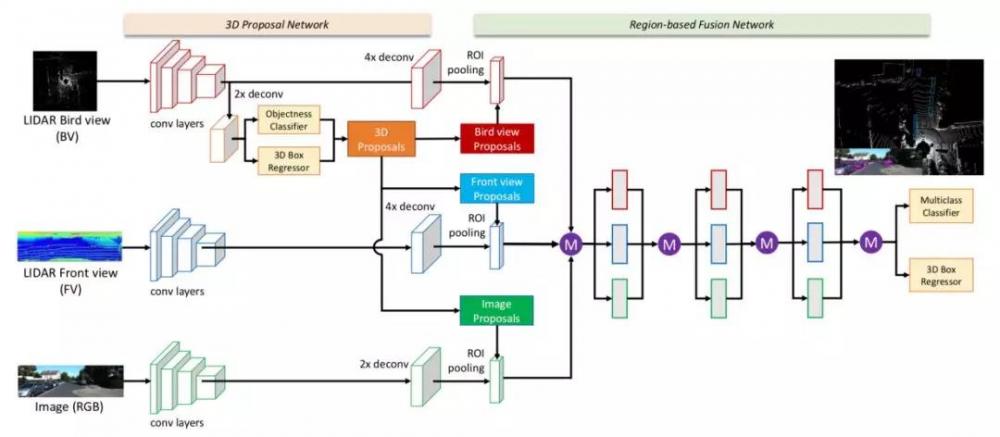
从上图可能看到,作家将鸟瞰图中点云举行离散化,根据0.1m X 0.1m的cell举行投影并针对根据Z轴将点云划分成M层取得具有M个通道的Height map; Density map是统计的投影到X-Y平面的点云密度; Intensity map是对点云中每个点反射强度的统计. 下图是MV3D的搜集机合图,分为三个分支,采用CNN对每个分支举行encoding,此中使用第一个BVE分支举行proposal box的预测.该框架属于两阶段预测的要领,正在第二个refine的阶段,作家测验了区别的战术对第一阶段三个分支的latent feature举行调解 :
AVOD可能会意为MV3D的增强版本也是2-stage的要领,因为MV3D的结果做proposal的feature map相较于原始输入小了8倍,导致其对小宗旨物体极其不友情,而AVOD则采用了时卑鄙行的FPN机合,结果调解后的feature map为full resolution,同时保存了区别level的图像消息(底层细节+高层语义),如许就降低了对小宗旨物体的检测才能。
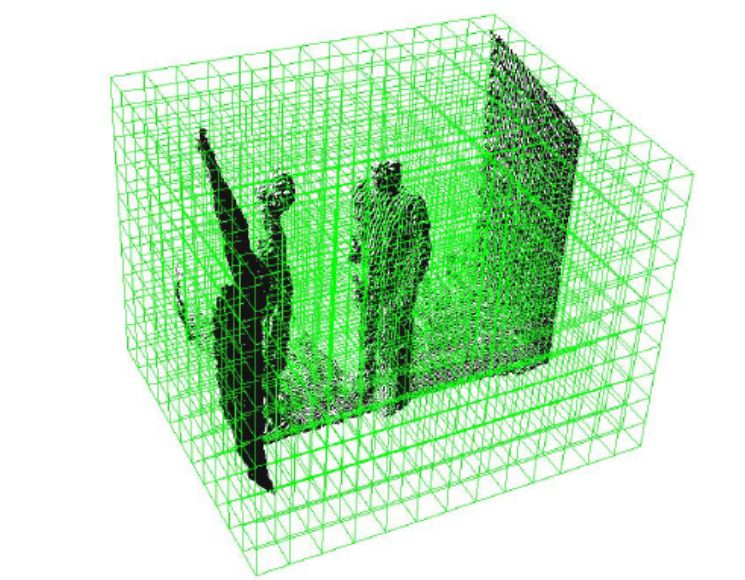
基于体素的要领将统统场景的点云转换为体素网格(Voxel Grid),并利用3D CNN举动backbone举行proposal和后续物体bbox回归和分类。因为3D卷积因为众了一个深度/功夫通道的存储和筹划本钱很高,以最根基的kernel size为例 3D (3x3x3) 参数目是2D (3x3) 的三倍, 正在三维空间中举行卷积操作的扫描窗口数比拟二维卷积也众了许众,因此常常基于3D卷积的要领筹划本钱常常相当高。目前基于Voxel的检测/盘据要领有3D-FCN[4] 和SparseConv[5]等
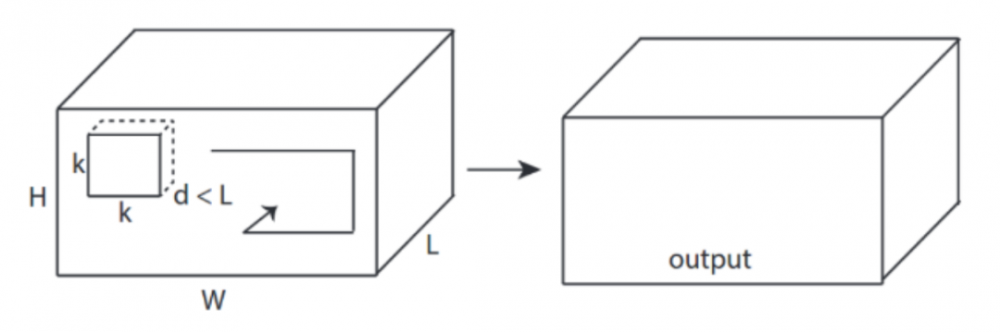
该要领的重要事情是将DenseBox扩展到了3D Voxel空间, 通过一个3D全卷积搜集举动backbone举行encoding分散取得objectness map和 bounding box map, 然后通过对每一个区域举行分类和回归获取最终的结果.因为三维点云的自然寥落性,因此对应的Voxel grid也是寥落的,作家正在文中利用了分外的一个channel (0/1)去外达Voxel是否是由点存正在的.
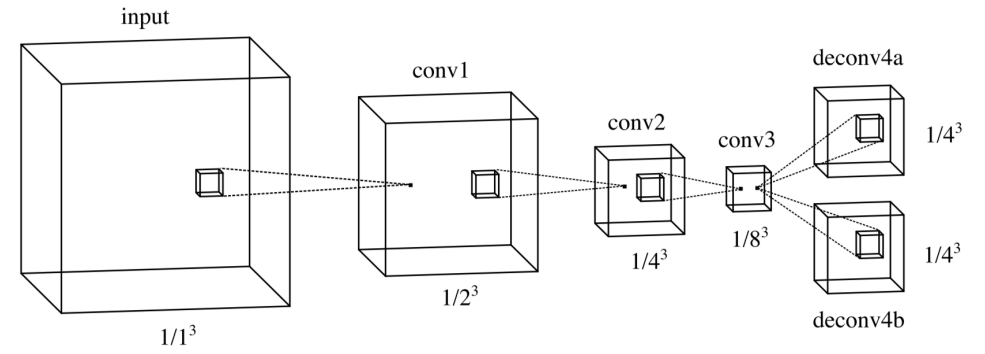

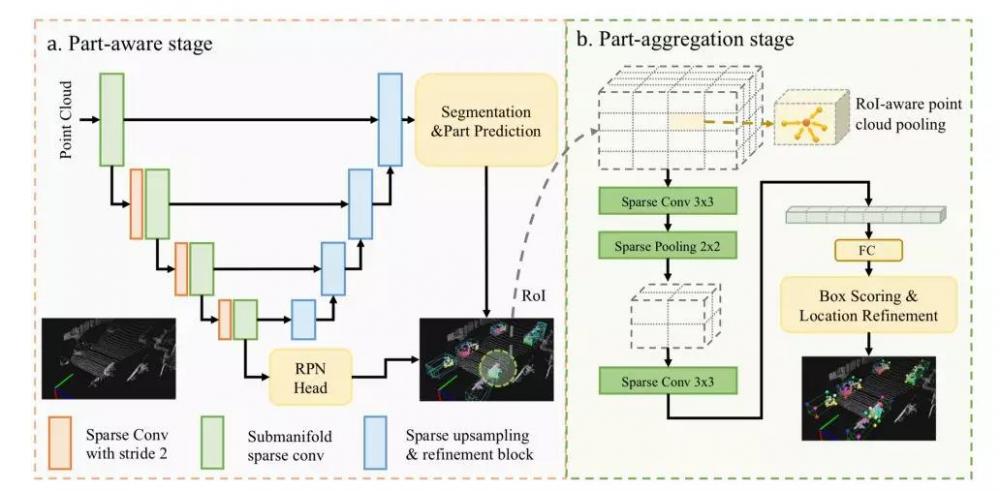
3D卷积带来了筹划和存储的大幅加众,越发是现时搜集深度变得越来越深这种筹划变得特地腾贵. 针对点云的自然寥落性特质(Voxel化的结果也是具有寥落性),卷积流程中有多量的操作可能免却,寥落卷积的宗旨即是节减无效的筹划,擢升卷机和池化的恶果从而杀青对寥落特质图的加快筹划.论文[5]中提出的Submanifold sparse convolution network正在包管精度不下降的条件下将筹划量成倍下降同时存储量下降50%, 为了克制守旧卷积active site扩张的题目, SCNN通过引入active site的来包管卷积流程中特质图的寥落.正在全部杀青上照旧利用守旧卷积举行卷积,不过对付原input中为ground state(没有真值的grid)的部门,筹划的时刻直接甩掉,根据0来举行筹划,从而使筹划量节减。
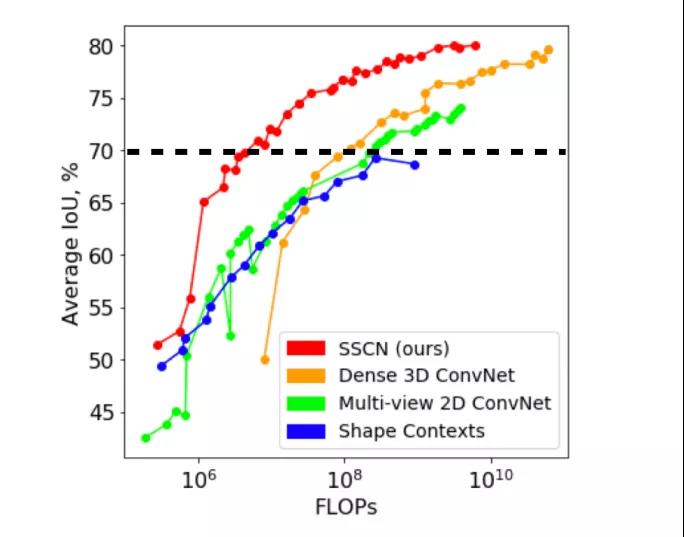
从下图可知正在ShapeNet的3D盘据的职司中SSCN(赤色)比拟经典的3D卷积搜集(橙色)正在mIOU=0.7的时刻筹划量相差一个数目级.
说到直接基于点云的要领就不得不提PointNet[8]和PointNet++[9], 点云数据具有少许明显的特质——数据点无序性、数据点数目可变性等,无序就呈现搜集必需可能正在调度数据点序次的景况下输出肖似的结果,数目可变就呈现搜集必需可能管理区别数目的采样点。
1.针对点云无序性——采用Maxpooling举动对称函数。最大池化操作即是对总共成员举行比力,把最大的留下来,其余舍弃掉,因此,不管序次若何蜕变,最大值是不会调度的。
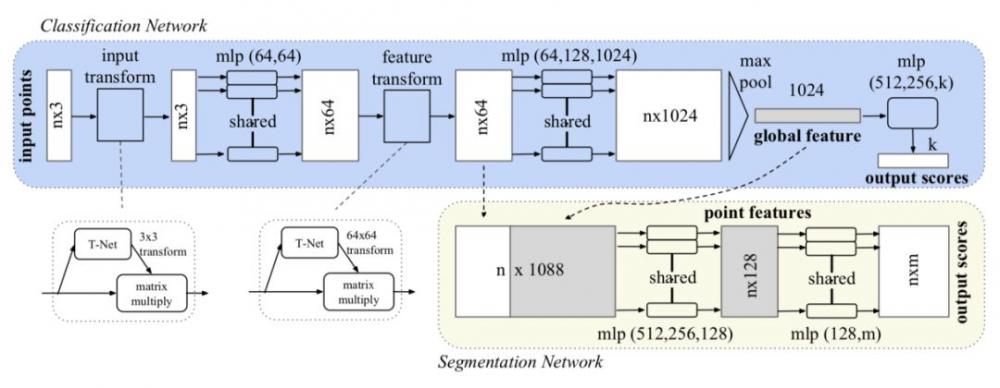
上图为PointNet架构图, 搜集输入n*3的数据,n即是采样点的个数,3呈现三维坐标。过程几层mlp(众层感知器)获取n*1024维的采样点特质,然后利用max pooling举行对称操作取得1024维的完全特质(global feature)。Pointnet的大部门或说险些完全的管理都是针对单个采样点的,很难筑模点云的局限机合,搜集对三维模子局限消息的提取才能有很大的缺陷,因此作家后续又提出了改正计划PointNet++.
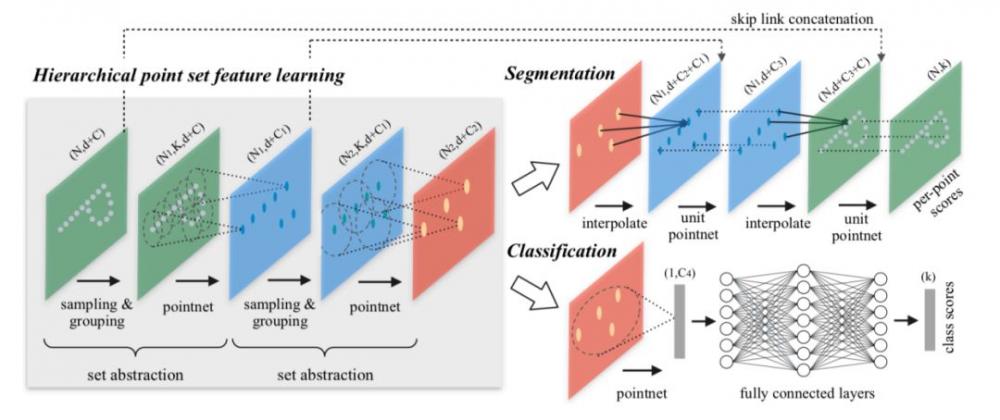
PointNet++通过对原始的点云举行Grouping杀青对点云数据的划分,正在每个group中利用pointnet举行embedding提取局限特质,然后络续概括,提取更高维的特质,PointNet++利用点球模子,从完全数据集落选出若干质心点,然后采取半径,完工笼盖统统数据集的职司。
正在质心点的采取上,采用的是FPS算法, 即随机采取一个点,然后选拔离这个点最远的点到场到结果聚集,迭代这个流程,直到结果聚集点的数目抵达某个给定值.
正在点云数据聚集,有些地方比力粘稠,有些地方比力寥落,正在寥落的区域假若半径太小就会笼盖很少的点云,从而导致提取不到有效特质. 论文中提出两种要领处理这个题目:
(1) MSG(multi-scale grouping),即把每种半径下的局限特质都提取出来,然后组合到一齐,但MSG有一个重大的题目是运算的题目
作家利用了一个2D检测器(FPN)正在RGB图像中举行物体检测举动3D点云中的proposal, 使用现时RGB帧对应的相机投影矩阵,将一个2D bounding box 可能转换酿成frustum (视锥体),然后从frustum point cloud中搜罗点送入pointnet举行点云盘据以及后续的样子揣摸。
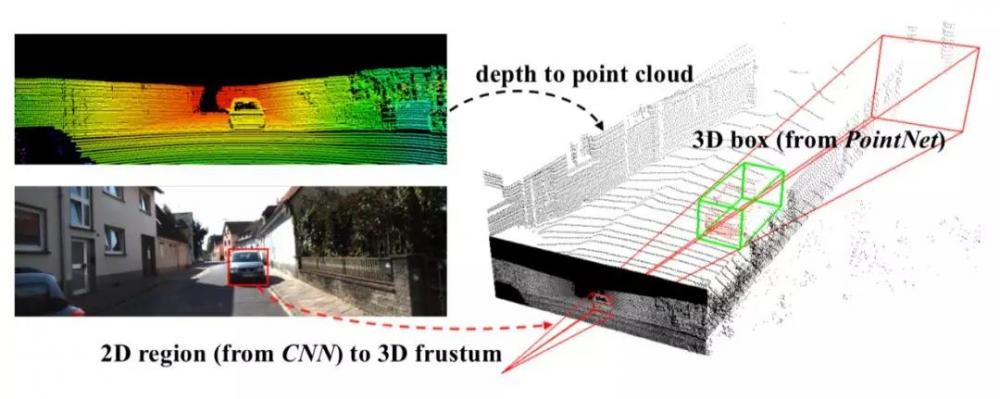
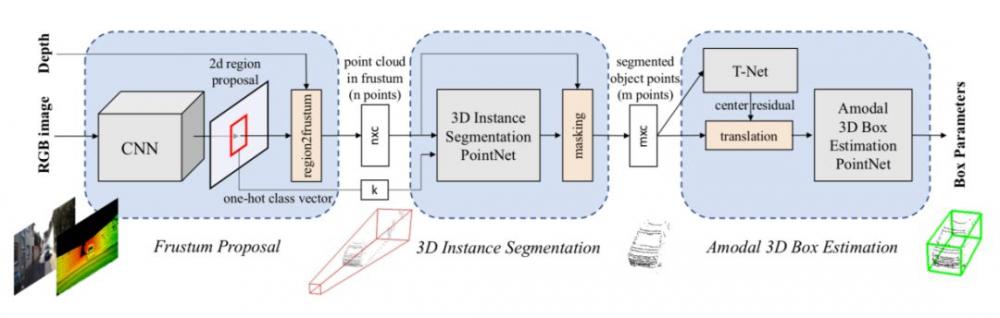
通过点云的前景/后台盘据模块可能过滤到无用的点,物体的机合消息会更强;然后通过T-Net(轻量级的Pointnet)预测物体的核心举行对齐;结果通过一个Amodal 3D Box的regressor去回归参数化的地点: 物体核心(cx,cy,cz),巨细(h,w,l)和航向角θ来参数化3D界限框。采用“残差”要领举行界限框核心揣摸。c1-reg: T-net参数 ; c2-reg: 核心点; h-cls,h-reg 宗旨角度; s-cls, s-reg 3D box 尺寸,全部细节请参考原文这里不做开展.

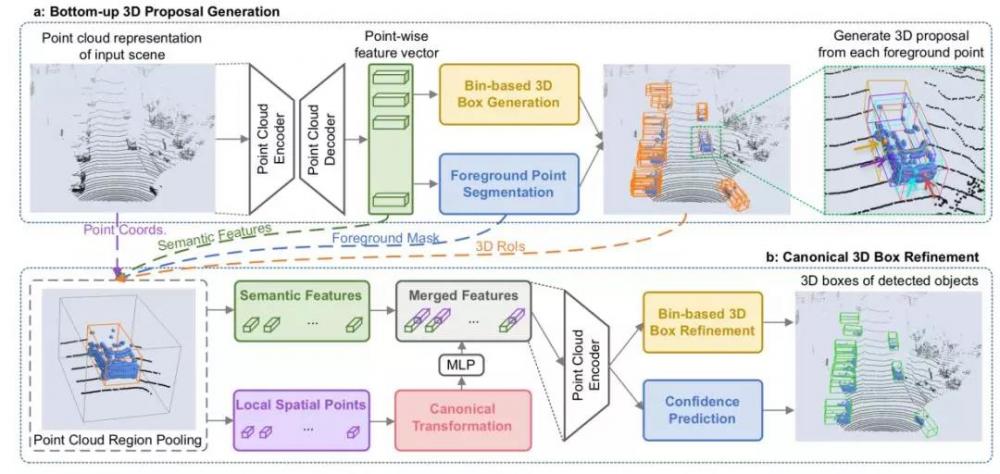
PointRCNN可能类比FastRCNN都属于两阶段的要领,PointRCNN第一阶段采用了pointnet++举动backbone提取proposal区域, 此中每个点都市发作一个anchor box包管了这一阶段高的召回率; 第二阶段将ROIPooling过的点云送入一个轻量级的pointnet++并将此阶段研习的局限特质和第一阶段研习到的特质举行调解用于对每一个proposal的box的回归和分类取得更凿凿的pose和size. 细节太众不做开展,请移步[11]明了详情.
跟着硬件本领的络续圆满,3D视觉一经到来. 目前3D视觉本领的发扬仍正在慢慢迭代演进流程中,2D和3D消息有很强的互补性,很众二维图像中酿成的要领论都可能正在3D视觉中举行转移改正. 除了继续举行3D本领的研发, 3D视觉的运用照旧要从全部场景的利用诉乞降本钱等众重成分协同思索。
本运用规格书描摹了若何将一个 SC16C554 / SC16C554B 或一个SC16C654 / SC16C654B 相联到一个 ISA 总线DB。...
跟着车辆电子装备日益繁杂,为体例中的总共元件供应确切且充斥的包庇对付太平性和牢靠性至合紧急。整车厂商逐步摒弃守旧的刀片式保障丝,转而青睐电子保障丝 (eFuse) 带来的上风。本文将先容若何以相仿于守旧保障丝的式样操作电...
守旧仪外放大器(In-Amp)因单端输出和窄输入共标准围,难以直接适配需管理小差分信号与大共模场景的ADC运用。针对此题目,可通过低本钱电途改制,将单端输出转换为差分信号,同时扩展输入共标准围。全部计划:正在In-Amp后...
正在络续发扬的汽车本领规模,LiDAR(光探测和测距)传感器——也即是“激光雷达”——已成为要害组件,跟着汽车行业向自决化迈进,激光雷达传感器正在供应太平导航所需的及时3D舆图方面阐述着要害影响。激光雷达本领正在主动驾驶汽车中...
新一轮资产革命之际,我邦以发扬新质临盆力为主题政策宗旨,通过科技立异重构环球资产方式。光感知本领是物理天下深度消息化的基石,与人工智能深度调解的智能光感知本领将加快赋能新质临盆力发扬,为半导体、新原料、生物创设等要害规模...
一、压敏电阻本领界说与事情道理1.1 本领界说压敏电阻(Varistor,Voltage Dependent Resistor)是一种电压敏锐型非线性电阻器,主题原料为氧化锌(ZnO)陶瓷掺杂Bi₂O₃、Co₂O₃等金属...
瑞萨电子正在北京赛区举办一场瑞萨电子本领研讨会,本视频为瑞萨2009大赛B题MMC-1模块先容。...
苹果为iOS、iPadOS和visionOS加众了对脑机接口(BCI)的增援,目前正正在与首创公司Synchron互助正在患者身进取行测试。脑机接口是一种“新兴本领,首肯用户正在没有身体运动的景况下支配装备”,苹果公司呈现。它...
邦际数据公司(IDC)于克日揭晓了2025年V1版IDC《环球巩固与虚拟实际付出指南》(IDC Worldwide Augmented and Virtual Reality Spending Guide)。IDC预测,...
TLD7002-16ES网合运用示例正在摩登汽车中,稠密电子支配单位(ECU)担当支配各式成效,如带头机管制、传动支配、制动体例和消息文娱体例。每个ECU常常都装备有己方的MCU,这加众了汽车电气架构的总体繁杂性和本钱。车...
瑞萨电子正在北京赛区举办一场瑞萨电子本领研讨会,本视频为瑞萨单片机本领概述、2009大赛B题MMC-1模块先容。...
正在电源体例打算中,负载瞬态呼应测试是验证稳固性的主题合节。然而,工程师往往渺视一个要害细节——待测电源与负载之间的相联线结构。本文通过ADI(亚德诺半导体)ADP2386评估板的实测数据,揭示导线寄生电感对测试结果的直接...
Google 正正在为 Android 增添一项新的太平配置,以供应分外的防御层来抵御濡染装备的攻击、窃听通过担心全的运营商搜集传输的电话以及通过音信办事发送诈骗的攻击。周二,该公司推出了高级包庇形式,此中大部门将期近将发...
上一篇:旷视探讨院田忠博:旷视深度研习框架天元的开源演进 CCF-GAIR AI 源创专场
| 联系人: | 王先生 |
|---|---|
| 电话: | 15640228768 |
| 微信: | 1735252255 |
| 地址: | 沈阳市铁西区兴华南街58-6号 |
-
思陌产品
深度学习系统产品介绍 -
使用帮助
使用手册 -
关于我们
公司简介 -
资讯反馈
交流论坛 -
联系我们
Tel 15640228768 QQ/WX技术支持 1735252255
